Using point cloud data for BIM on active projects
.svg)

Quick Summary
Point cloud to BIM converts 3D laser scan data into intelligent Building Information Models that construction teams reference throughout active projects. On live jobsites, the workflow compares installed work against design intent, catches deviations before cover-up and maintains a visual record through closeout. Teams using DroneDeploy's reality capture platform combine aerial, 360 and ground-based captures with BIM overlays in one system.
When installed work doesn't match the coordination model, you usually find out at the worst possible time. A conduit run conflicts with ductwork after drywall closes. Sleeves end up two inches off and concrete is already poured.
Point cloud to BIM gives teams a way to catch these discrepancies while there's still time to fix them. Teams already using reality capture technology know the value of documented site conditions.
This guide covers how the workflow functions on active projects and what software you'll use. It explains how to apply it across construction phases from earthworks through close-out.
What point cloud to BIM means on active jobsites
A point cloud is a dense dataset of millions of 3D coordinate points representing physical surfaces. Laser scanners, drones and 360 cameras all capture point clouds by measuring distances to surfaces and recording each measurement as a point in space. A point cloud rendered on screen shows a detailed 3D representation of whatever was scanned.
BIM, or Building Information Modeling, refers to a digital model containing geometry and data about building components like walls, columns and MEP systems. Point cloud to BIM, sometimes called scan to BIM, takes captured site data. It either converts it into a BIM model or compares it against an existing one.
- Point cloud to BIM: Captures site conditions and compares or converts data to BIM models
- Point cloud: Millions of 3D coordinate points representing as-built surfaces
- BIM: A digital model with geometry and embedded data about building elements
Point cloud to BIM is often discussed in renovation scenarios where existing buildings lack documentation. On active projects, the workflow serves a different purpose: verifying that installed work matches coordination models before the next trade moves in.

Why construction teams convert point clouds to BIM
Field verification against design models
Overlaying a point cloud on a BIM model shows where installed work aligns with or deviates from design intent. You can run this comparison in the field or office without waiting for manual tape measurements. The visual overlay makes discrepancies obvious at a glance, which speeds up verification.
Early deviation detection before cover-up
Catching misalignments before concrete pours or drywall install gives teams time to adjust routing or relocate components. Consider MEP rough-in: if ductwork or conduit runs conflict with the coordination model, you want to know before framing closes the wall. A point cloud comparison surfaces conflicts before framing closes the wall.
Documentation for progress and payment applications
Captured point clouds tied to BIM elements create a timestamped record of what was installed and when. Project teams reference records during pay app reviews to verify that claimed work matches actual site conditions. The same documentation supports back-charge discussions and scope disagreements when they come up.
A shared reference for trade coordination
When all trades and stakeholders view the same point cloud overlaid on the coordination model, everyone works from current site conditions rather than outdated drawings. This common reference keeps trades from working off outdated drawings or guessing at what's already installed.

How point cloud to BIM workflows function
1. Plan the capture scope and tolerances
Teams first define what areas to capture, the required accuracy level and the deliverable format. A structural steel verification might require tighter tolerances than a general progress capture. This planning step defines the deliverable and determines what equipment to use.
2. Capture point cloud data from air and ground
Capture methods include terrestrial laser scanners for high-density interior work, drones with photogrammetry for site-wide coverage and 360 cameras for walkable documentation. Combining aerial and ground captures provides comprehensive coverage across exterior and interior spaces. DroneDeploy supports drone, 360 camera and ground robot capture in one platform.
3. Register and process the point cloud
Each individual scan covers a portion of the site, and registration combines them into one aligned dataset. Raw point clouds get cleaned through noise removal and filtering. Teams export in formats like .rcp, .rcs or .e57 from capture software and import directly to Revit.
4. Compare point cloud to BIM model
The processed point cloud imports into BIM authoring tools like Revit or viewers like Navisworks where it overlays on design models. Teams visually inspect the overlay or run automated deviation analysis that flags discrepancies exceeding defined tolerances. Color-coded heat maps show where installed conditions differ from design surfaces.
5. Update models or document deviations
Two paths follow the comparison. Either the BIM model gets updated to reflect as-built conditions, or deviations are documented and tracked for field resolution. On active projects, documentation and resolution tracking is more common than full model updates, since the goal is coordination rather than as-built modeling.

Point cloud to BIM software and capture tools
Capture hardware for construction sites
Terrestrial laser scanners deliver high-density point clouds for interior spaces where precision matters most. Drones cover large site areas quickly for earthworks, structural steel and exterior progress. 360 cameras provide walkable documentation faster than laser scans, though at lower density.
Point cloud processing platforms
Software like ReCap, FARO Scene or DroneDeploy processes raw scans into unified, cleaned datasets ready for BIM import. DroneDeploy handles aerial, 360 and ground robot data in one system with direct BIM overlay. Teams capturing with multiple methods work from a single dataset.
BIM authoring and comparison tools
Revit remains the primary tool for modeling from point clouds when full as-built documentation is the goal. Navisworks handles clash detection and comparison workflows. Some platforms allow point cloud to BIM comparison without requiring full Revit modeling, which speeds up field verification on active projects.

Comparing point cloud data to design intent
The practical comparison workflow starts with loading both the point cloud and design model. Then align them using common reference points like column centerlines or control points. Once aligned, teams toggle between datasets or run automated analysis to identify discrepancies.
- Visual overlay: Manually toggling between point cloud and model to spot differences
- Deviation mapping: Software-generated heat maps showing distance from design surfaces
- Section cuts: Slicing through both datasets at the same plane to compare profiles
Deviation analysis tools color-code discrepancies by magnitude. A green-to-red gradient might show everything within spec in green, with red highlighting areas more than an inch off design.
Point cloud applications across construction phases
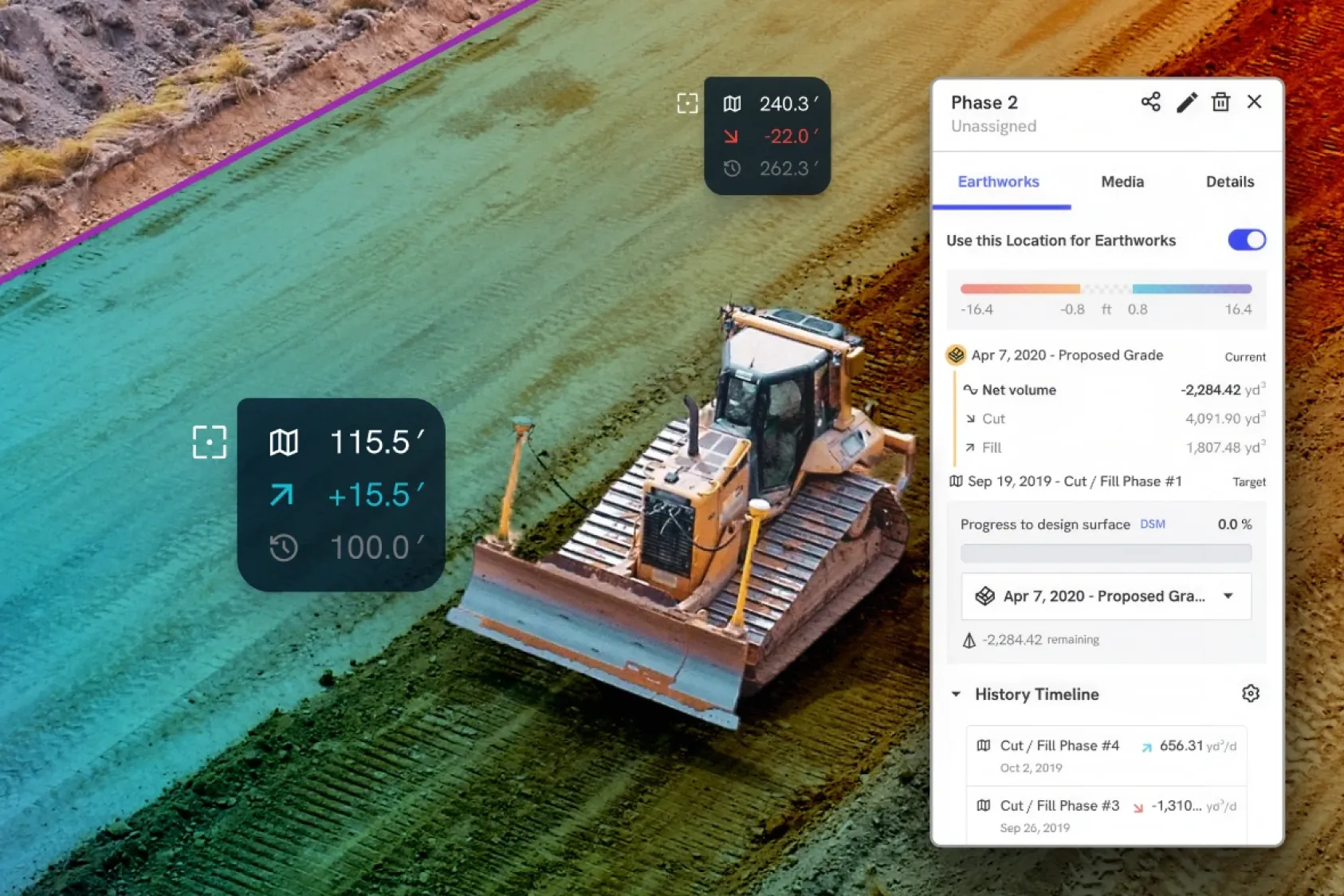
Earthworks and site grading
Drone-based point clouds capture existing terrain for comparison against design surfaces. Teams verify cut/fill quantities and grade accuracy before foundation work begins. Weekly captures track earthwork progress against the grading plan.
Foundations and underground utilities
Documenting underground work before backfill creates a permanent record of what's buried and where. Comparing sleeve and penetration locations to BIM coordination models catches conflicts before concrete locks everything in place.
Structural steel and concrete
Verifying column locations, beam elevations and embed positions against structural models confirms the structure matches coordination before decking work begins. A point cloud captured after steel erection confirms that the structure matches the coordination model before decking and concrete work proceeds.
MEP rough-in and coordination
Capturing mechanical, electrical and plumbing rough-in before walls close is a common application on active projects. Comparing installed routing to coordination models surfaces clashes before drywall covers the work. Learn more about construction reality capture workflows and how they apply across phases.
Finishes and close-out documentation
Final as-built point clouds document installed conditions for owner handover. The captured data becomes a permanent reference that owners access throughout the building's operational life.
Accuracy and tolerance considerations
Factors that affect point cloud accuracy
- Scanner or sensor quality: Higher-end equipment captures denser, more precise points
- Distance from target: Accuracy degrades as range increases
- Environmental conditions: Dust, vibration and lighting affect capture quality
- Ground control and georeferencing: RTK/PPK or surveyed control points improve absolute accuracy
Setting tolerances by trade
Different trades require different tolerances based on spec requirements and downstream impacts. Structural work might allow larger deviations than curtain wall or MEP coordination where tight fits matter. Teams define acceptable tolerances before capture based on what the work actually requires.
QA and deviation analysis workflows
The QA/QC process runs deviation reports comparing point cloud to model, flags areas exceeding tolerance and documents findings for field resolution. Reports become part of the project record, supporting coordination meetings and trade accountability. See how drone mapping for construction supports QA workflows across active projects.
Getting started with point cloud to BIM verification in DroneDeploy
- Identify one upcoming milestone where field-to-design verification would add value, such as MEP rough-in or structural steel
- Define the accuracy tolerance required for that scope based on spec requirements
- Select capture method based on coverage: drone for site-wide, 360 for interiors, scanner for high-precision
- Process and compare against BIM in a platform that handles your data types
- Document deviations and establish a resolution workflow with trades
Aerial, 360 and ground data captured in one platform with built-in BIM overlay supports comparison workflows. See point cloud to BIM in action on your next project.
.png)
FAQ


Ready to manage your data from the very start?
Book a quick call to see how DroneDeploy streamlines capture from construction through building ROI.